
Così in Svizzera i robot “apprendono” i segreti del trekking
Così in Svizzera i robot “apprendono” i segreti del trekking
Il Politecnico di Zurigo ha elaborato un approccio di controllo che permette ad ANYmal di muoversi rapidamente e robustamente su terreni ostici

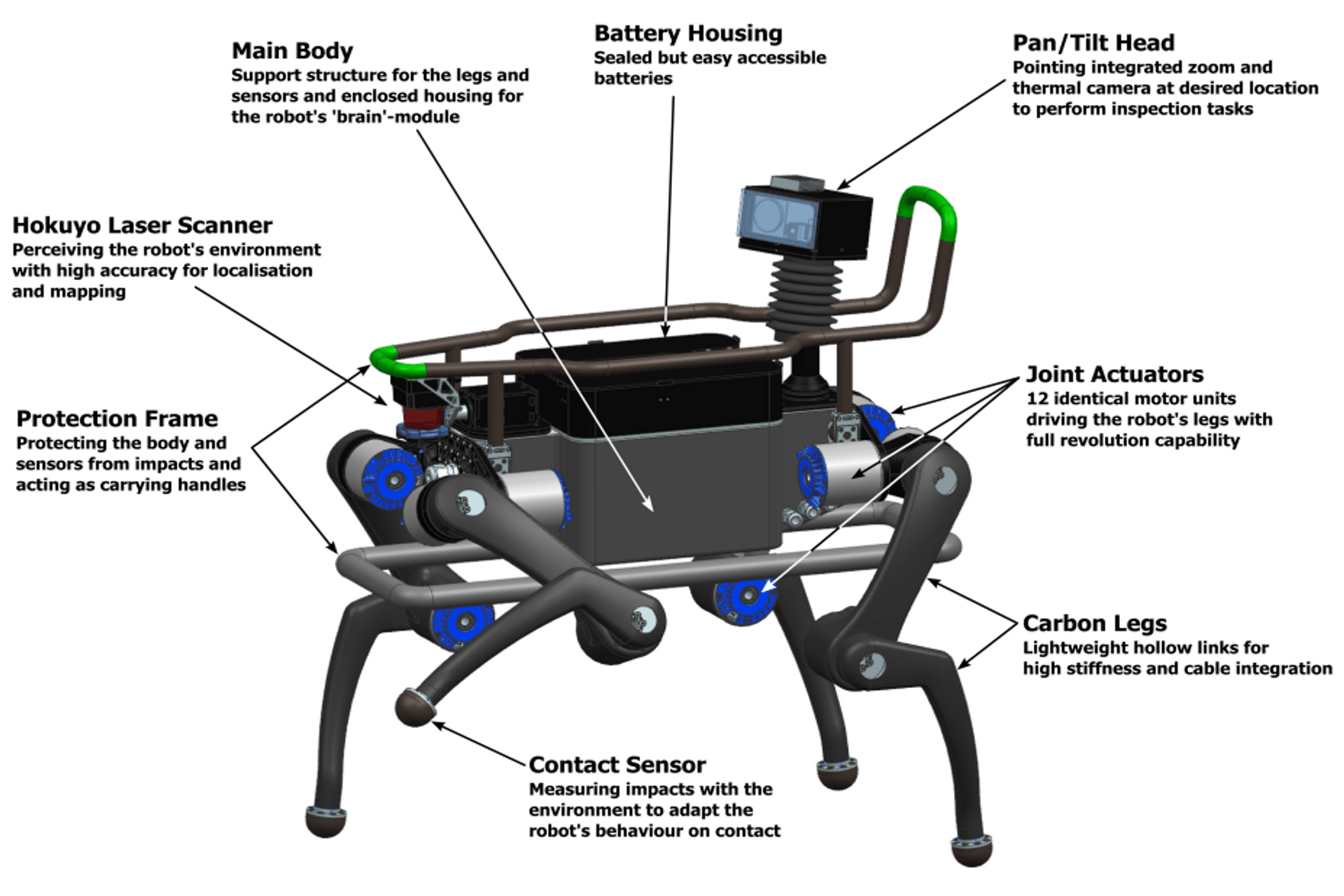
I ricercatori del Politecnico di Zurigo, guidati da Marco Hutter, hanno sviluppato un nuovo approccio di controllo informatico che permette a un robot dotato di zampe artificiali, chiamato ANYmal, di muoversi rapidamente e robustamente su terreni difficili.
Grazie al machine learning, il robot può combinare la propria percezione visiva dell’ambiente con il senso del tatto per la prima volta.
La Svizzera è padrona nella competizione di robotica DARPA

La sfida della robotica alle asperità naturali del monte Etzel
Tratti ripidi su terreno scivoloso, gradini alti, ghiaioni e sentieri forestali pieni di radici: il percorso sul monte Etzel, alto 1.098 metri, all’estremità meridionale del lago di Zurigo, è costellato di numerosi ostacoli.
Ma ANYmal, il robot quadrupede del Robotic Systems Lab dell’ETH, supera i 120 metri verticali senza sforzo in 31 minuti di cammino.
Questa performance è più rapida di quattro minuti della durata stimata per gli escursionisti umani, e senza cadute o passi falsi.
Ciò è reso possibile da una nuova tecnologia di controllo, che i ricercatori del Politecnico di Zurigo, guidati dal professore di robotica Marco Hutter, hanno recentemente presentato sulla rivista settoriale Science Robotics.
“Il robot ha imparato a combinare la percezione visiva dell’ambiente con la propriocezione, il suo senso del tatto, basato sul contatto diretto delle gambe. Questo gli permette di affrontare terreni accidentati in modo più veloce, più efficiente e, soprattutto, più robusto”, dice Hutter.
In futuro, ANYmal potrà essere utilizzato ovunque sia troppo pericoloso per gli esseri umani o troppo impraticabile per altri robot.
Robot liquidi come… cellule per esplorare ambienti estremi
La “chiave” è quella di percepire gli ambienti con precisione
Per orientarsi su terreni difficili, gli esseri umani e gli animali combinano abbastanza automaticamente la percezione visiva del loro ambiente con la propriocezione delle loro gambe e delle mani.
Questo permette loro di gestire facilmente terreni scivolosi o morbidi e di muoversi con fiducia, anche quando la visibilità è scarsa. Finora, i robot dotati di “gambe” sono stati in grado di fare tutto ciò soltanto in misura limitata.
“La ragione è che le informazioni sull’ambiente circostante registrate dai sensori laser e dalle telecamere sono spesso incomplete e ambigue”, spiega Takahiro Miki, uno studente di dottorato nel gruppo del professor Hutter e autore principale dello studio.
Robot al… volante per saggiare le condizioni più ostiche

Insortomontabili erba alta, pozzanghere poco profonde o neve
Per esempio, l’erba alta, le pozzanghere poco profonde o la neve appaiono come ostacoli insormontabili o realtà parzialmente invisibili, anche se il robot potrebbe effettivamente attraversarli.
Inoltre, la vista del robot potrebbe essere oscurata sul campo da condizioni di luce difficili, polvere o nebbia.
“Ecco perché i robot come ANYmal devono essere in grado di decidere da soli quando fidarsi della percezione visiva del loro ambiente e procedere alacremente, e quando è meglio procedere con cautela e a piccoli passi”, dice Miki. “E questa è la grande sfida”.
Quei campi di addestramento virtuali basati su una rete neurale
Grazie a un nuovo controller basato su una rete neurale, il robot a gambe ANYmal, sviluppato dai ricercatori dell’ETH e commercializzato dalla spin-off del Politecnico di Zurigo ANYbotics, è ora in grado di combinare per la prima volta la percezione esterna con quella propriocettiva.
Prima che il robot potesse mettere alla prova le proprie capacità nel mondo reale, gli scienziati hanno esposto il sistema a numerosi ostacoli e fonti di errore in un campo di allenamento virtuale.
Questo ha permesso alla rete neurale di far imparare al robot il modo ideale di superare gli ostacoli, così come quando poter fare affidamento sui dati ambientali, quando farebbe meglio a ignorare tali dati.
“Con questo addestramento, il robot è in grado di padroneggiare il terreno naturale più difficile senza averlo visto prima”, dice Marco Hutter dell’ETH di Zurigo.
Ciò funziona anche se i dati dei sensori sull’ambiente circostante sono ambigui o vaghi. ANYmal, quindi, va sul sicuro e si affida alla propria propriocezione.
Secondo il professiore, “questo permette al robot di combinare il meglio dei due mondi: la velocità e l’efficienza del rilevamento esterno e la sicurezza del rilevamento propriocettivo”.
Guida veloce per la scrittura di un file Robots.txt

Uso in condizioni estreme al posto dell’uomo, e non soltanto…
Dopo un terremoto, dopo un disastro nucleare o durante un incendio in una foresta, i robot come ANYmal possono essere utilizzati dove è troppo pericoloso per gli esseri umani e soprattutto dove altri robot non possono affrontare terreni difficili o scoscesi.
Nel settembre dello scorso anno, ANYmal è stato in grado di dimostrare quanto bene funziona la nuova tecnologia di controllo nell’ambito del premio “DARPA Subterranean Challenge”, la competizione di robotica più conosciuta al mondo.
Il robot del Politecnico di Zurigo ha superato automaticamente e rapidamente numerosi ostacoli e terreni difficili mentre esplorava autonomamente un sistema sotterraneo di tunnel stretti, grotte e infrastrutture urbane.
Questo è stato uno dei motivi principali per cui i ricercatori del Politecnico di Zurigo, come membri del team CERBERUS, hanno ottenuto il primo posto, con un riconoscimento in denaro di 2 milioni di dollari.
C’è un drone che si “arrampica” sugli alberi per proteggerli

Potresti essere interessato anche a:

Stati Uniti: Grana Padano protagonista della ristorazione
Il Consorzio di Tutela vola a San Antonio per la prima tappa di una campagna che sensibilizza i consumatori sul tema dell’Italian Sounding

Deep Sea Mining, la corsa all’oro che minaccia le balene
L'allarme degli scienziati: se l’ISA darà il via libera all’estrazione di minerali sui fondali marini ci saranno conseguenze catastrofiche...

Tutta l’innovazione dell’approdo del Gruppo Chery in Europa
Il 4 luglio i brand cinesi Omoda e Jaecoo hanno fatto il loro debutto a Milano e sul nostro mercato con auto sostenibili e al passo dei tempi

Le sostanze chimiche degli pneumatici finiscono nel nostro cibo
Uno studio austriaco dimostra che gli additivi sprigionati dall’usura delle gomme su strada finiscono nelle verdure in vendita al supermercato

 //
//