
Un cane robot: l'invenzione elvetica ispirata alla biologia animale
Mickaël Achkar ha studiato i meccanismi biologici dei canidi per creare un automa più intelligente e costruire un prototipo che funzioni da solo

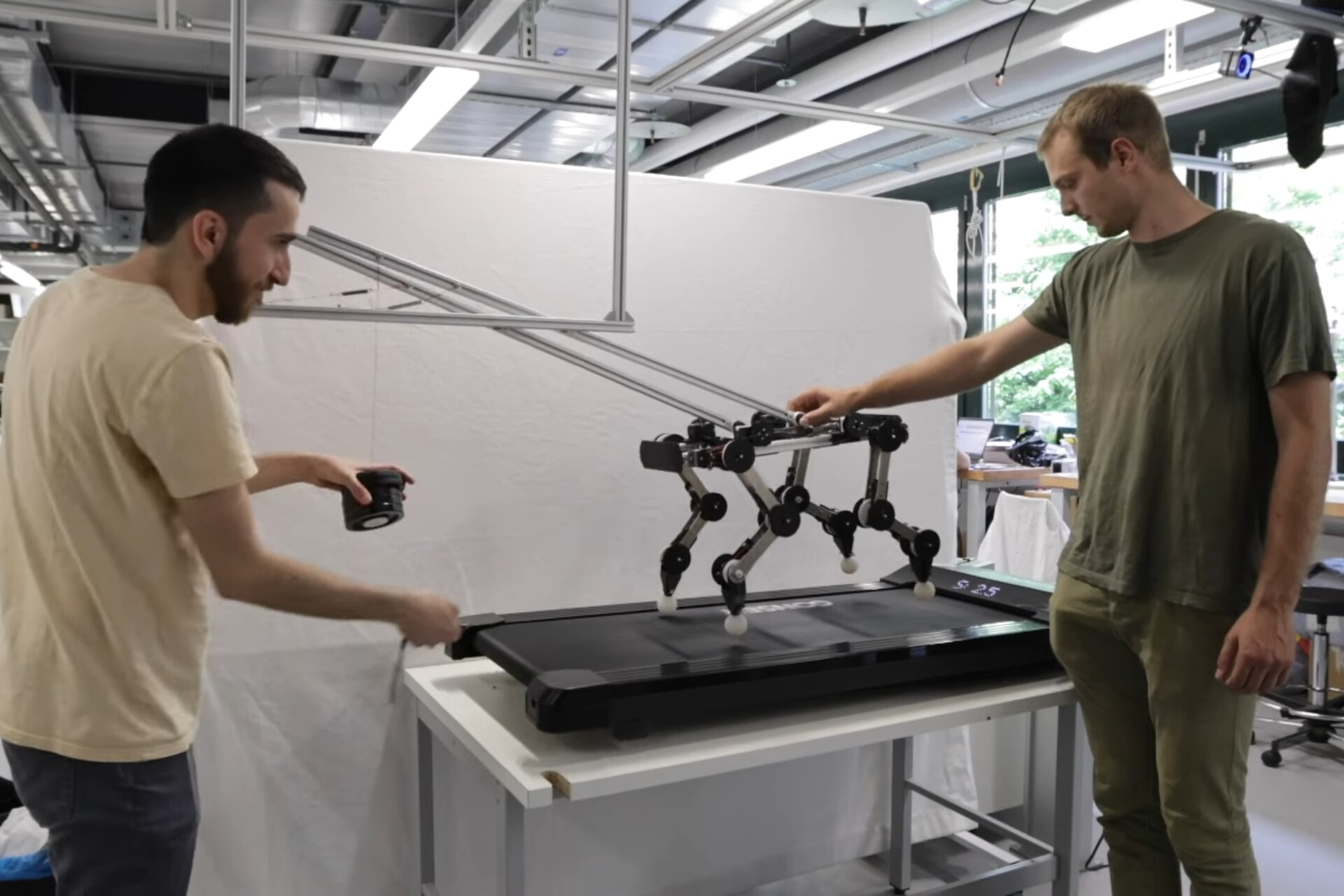
È stato costruito un cane robot in grado di muoversi. A progettarlo, gli ingegneri del Computational Robot Design & Fabrication Lab (CREATE) del Politecnico Federale di Losanna, diretto in Svizzera dalla professoressa Josie Hughes, i quali stanno escogitando nuovi modi per costruire robot con capacità mai viste prima.
Per esempio, lei e altri due ricercatori hanno usato ChatGPT per progettare una pinza robotica per la raccolta dei pomodori.
Mickaël Achkar ha utilizzato i dati di cattura del movimento di cani vivi per costruirne uno robotico. In particolare, egli ha studiato i meccanismi biologici dei canidi per creare un robot più intelligente e per costruire un prototipo in grado di funzionare da solo una volta messo in moto, senza attivare i motori.
A Tel Aviv un laboratorio Enel sull’uso di AI e robotica nell’energia
Così in Svizzera i robot “apprendono” i segreti del trekking
L’ispirazione arriva dai processi di controllo motorio degli animali, che guidano la progettazione dei nuovi automi
“Volevo progettare un robot con caratteristiche animali, tenendo presente che gli animali, come gli esseri umani, si muovono in un’enorme varietà di modi”, afferma il ricercatore canadese. “Ma la maggior parte di questi movimenti viene eseguita da poche articolazioni”.
Per questo motivo si è ispirato ai processi di controllo motorio degli animali per guidare la progettazione del robot. Il dottor Achkar avrebbe potuto scegliere qualsiasi animale (una cavalletta, un topo, un elefante o un ghepardo, per esempio), ma un cane si è rivelato la scelta più ovvia.
“Abbiamo trovato un vasto set di dati sul movimento dei cani, ed era persino disponibile in formato open source!”, spiega e aggiunge.
Il primo passo è stato quello di estrarre i dati sui movimenti sinergici dei cani e di strutturarli in modo da poterli “riassumere” in modo significativo, attraverso un metodo noto come analisi delle componenti principali.
“In pratica, si trattava di raggruppare i dati in diversi vettori che descrivevano gli assi principali del movimento del cane e di utilizzare queste informazioni per stabilire le specifiche esatte del robot”.
Ecco come il robot Atlas può già lavorare e interagire con noi
Con il DroneHub un’inedita… “voliera” per la ricerca sui droni
(Foto: EPFL)
Metallo, pulegge, cavi e viti: caratteristiche e peculiarità del cane robotico capace di correre come un vero animale
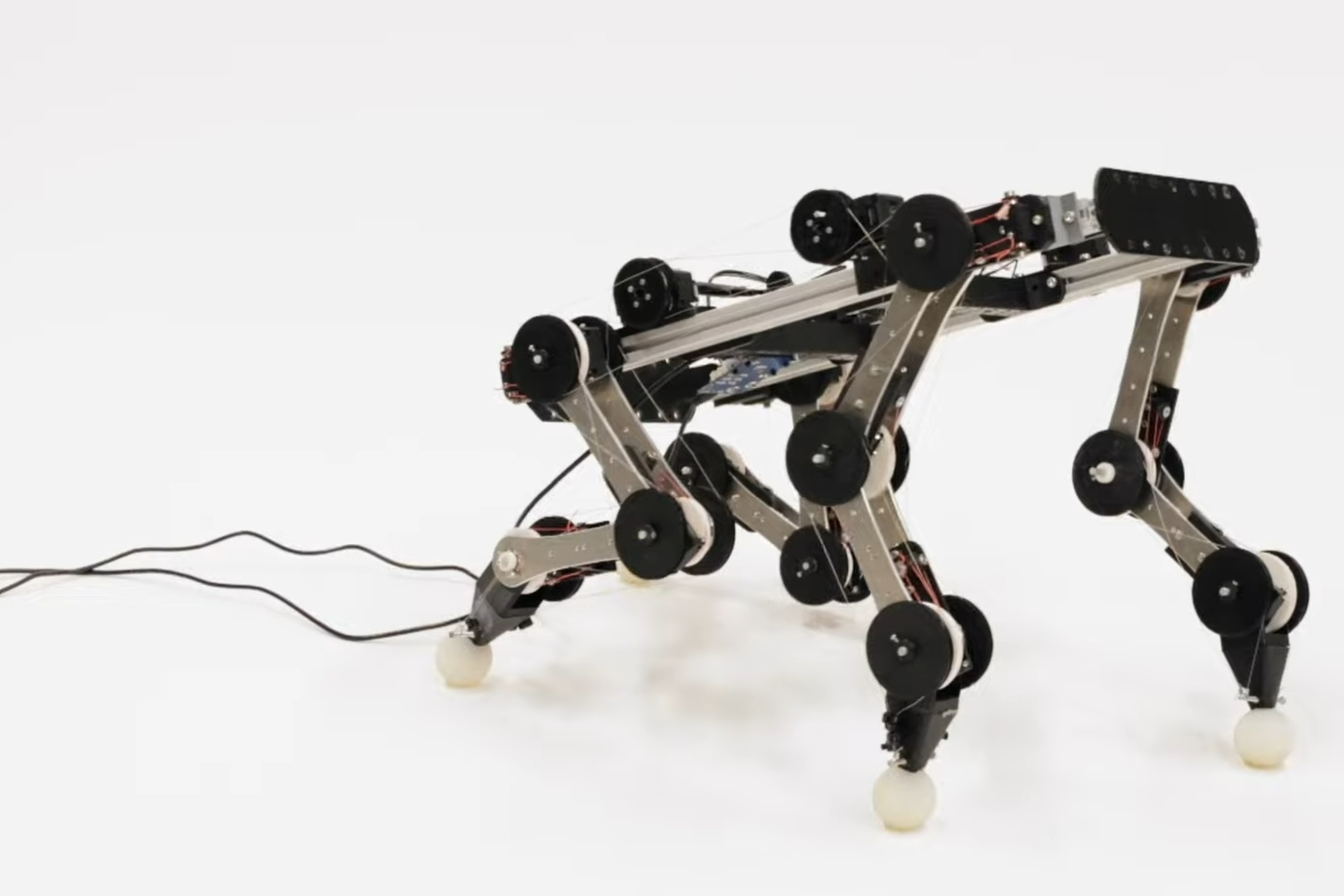
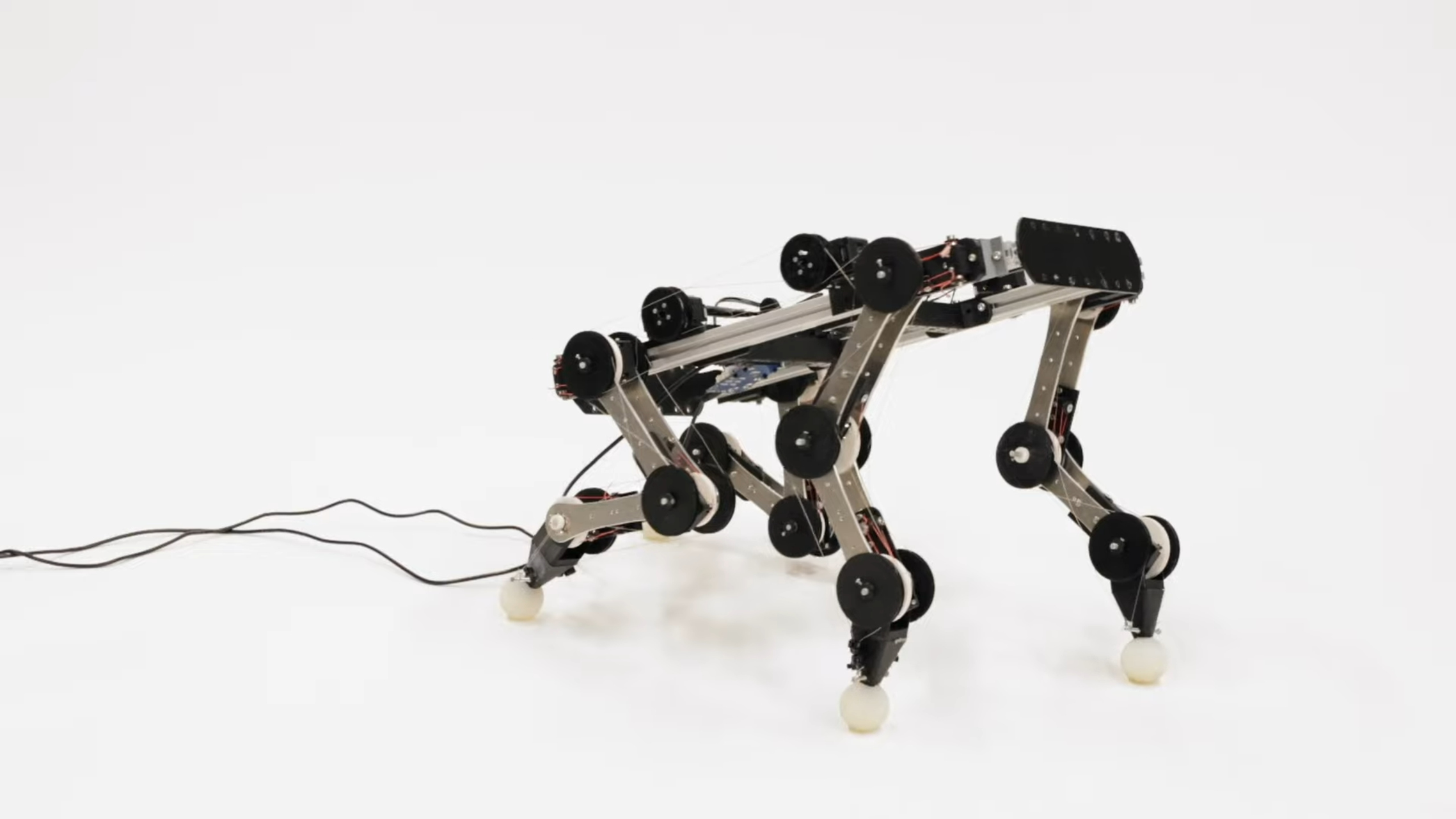
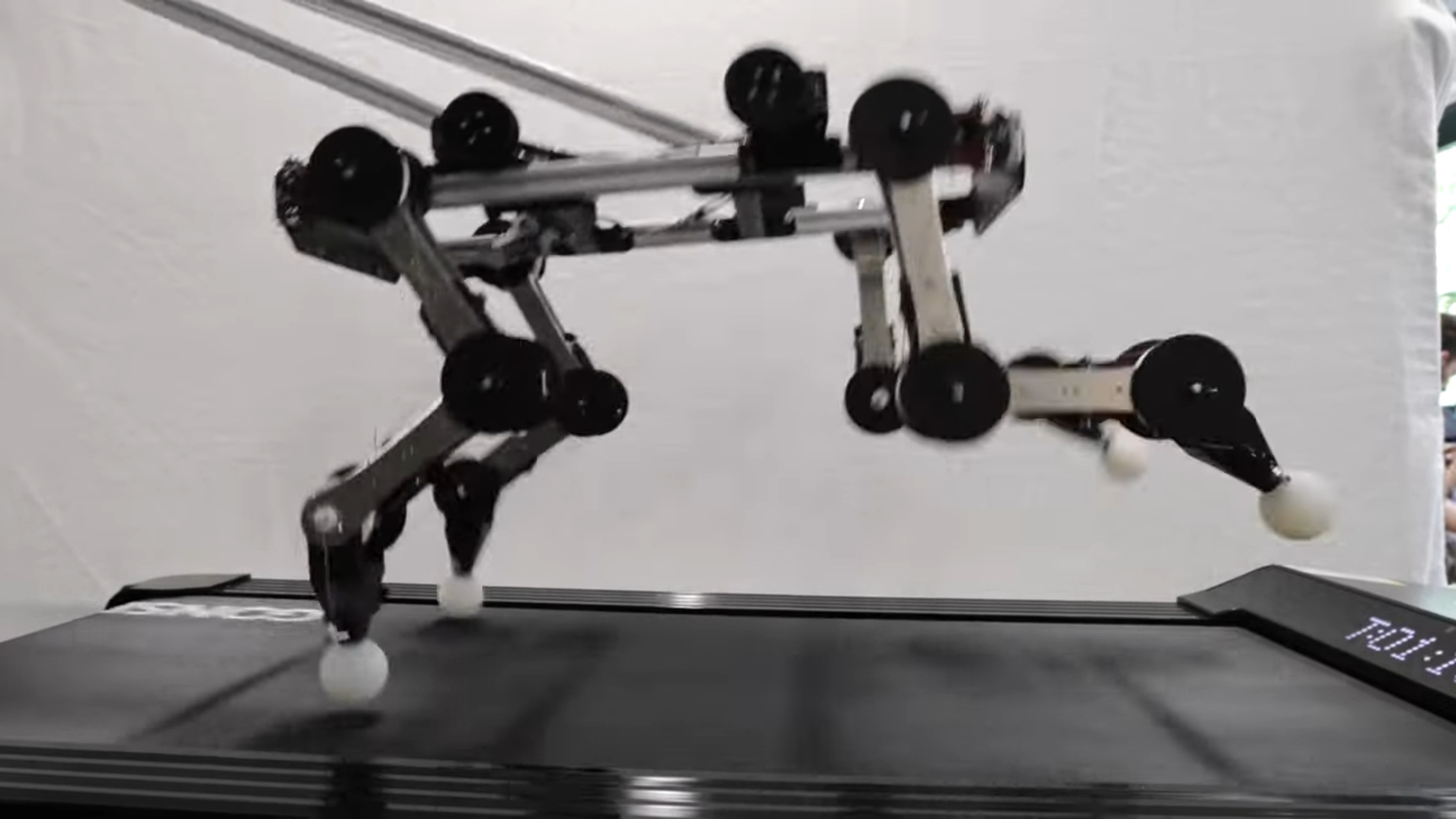
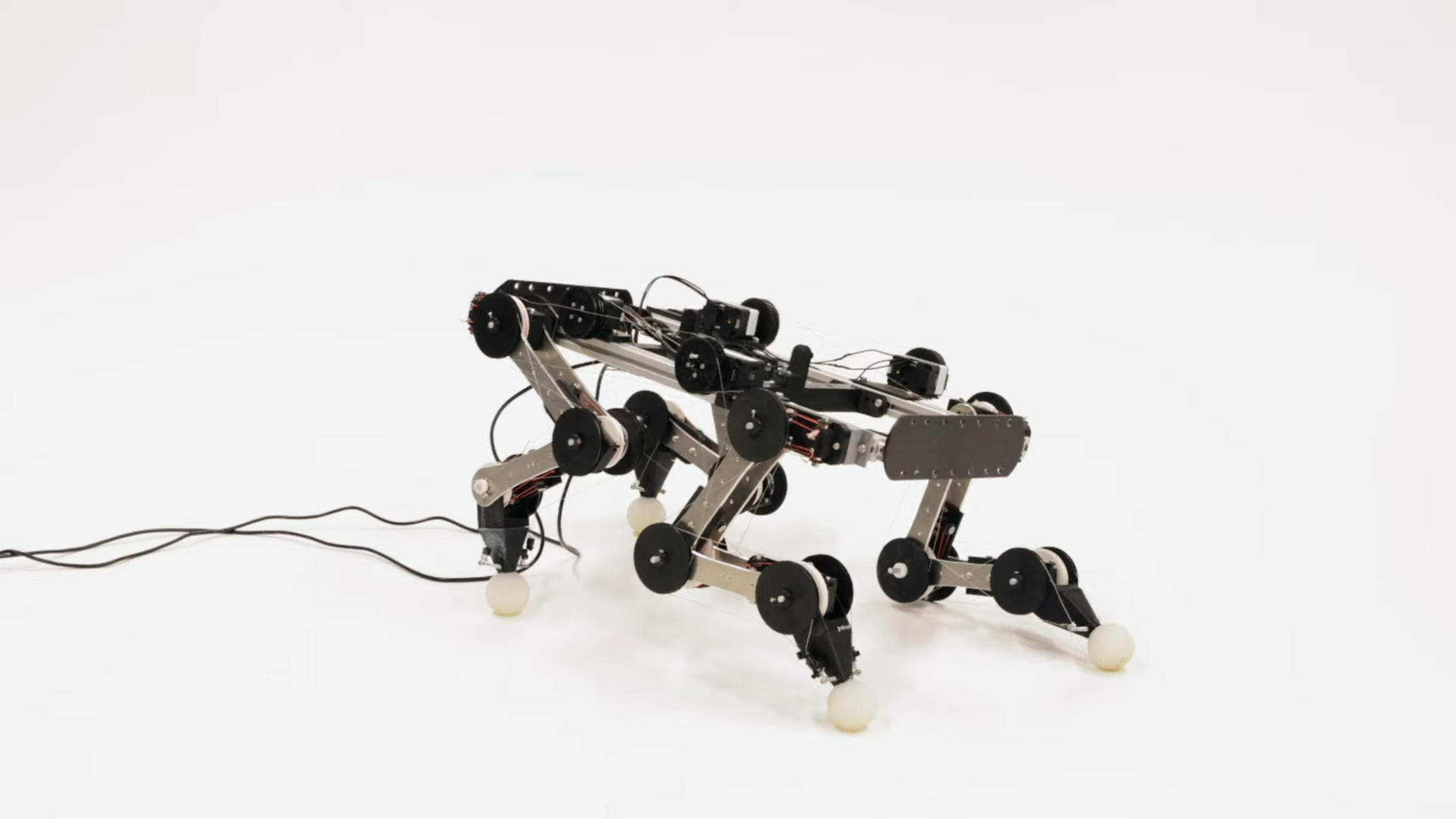
Il cane robotico di Mickaël Achkar ha una simmetria bilaterale. Ciascuna delle quattro zampe del robot ha tre articolazioni e ogni articolazione è coordinata con le altre. Quest’ultima caratteristica è il vantaggio aggiuntivo che permette al robot di correre come (e con tutta l’agilità) di un cane vero.
Per costruire il prototipo, egli ha utilizzato barre di metallo come ossa, pulegge stampate in 3D come articolazioni, cavi sottili come tendini e alcune viti per tenere insieme il tutto.
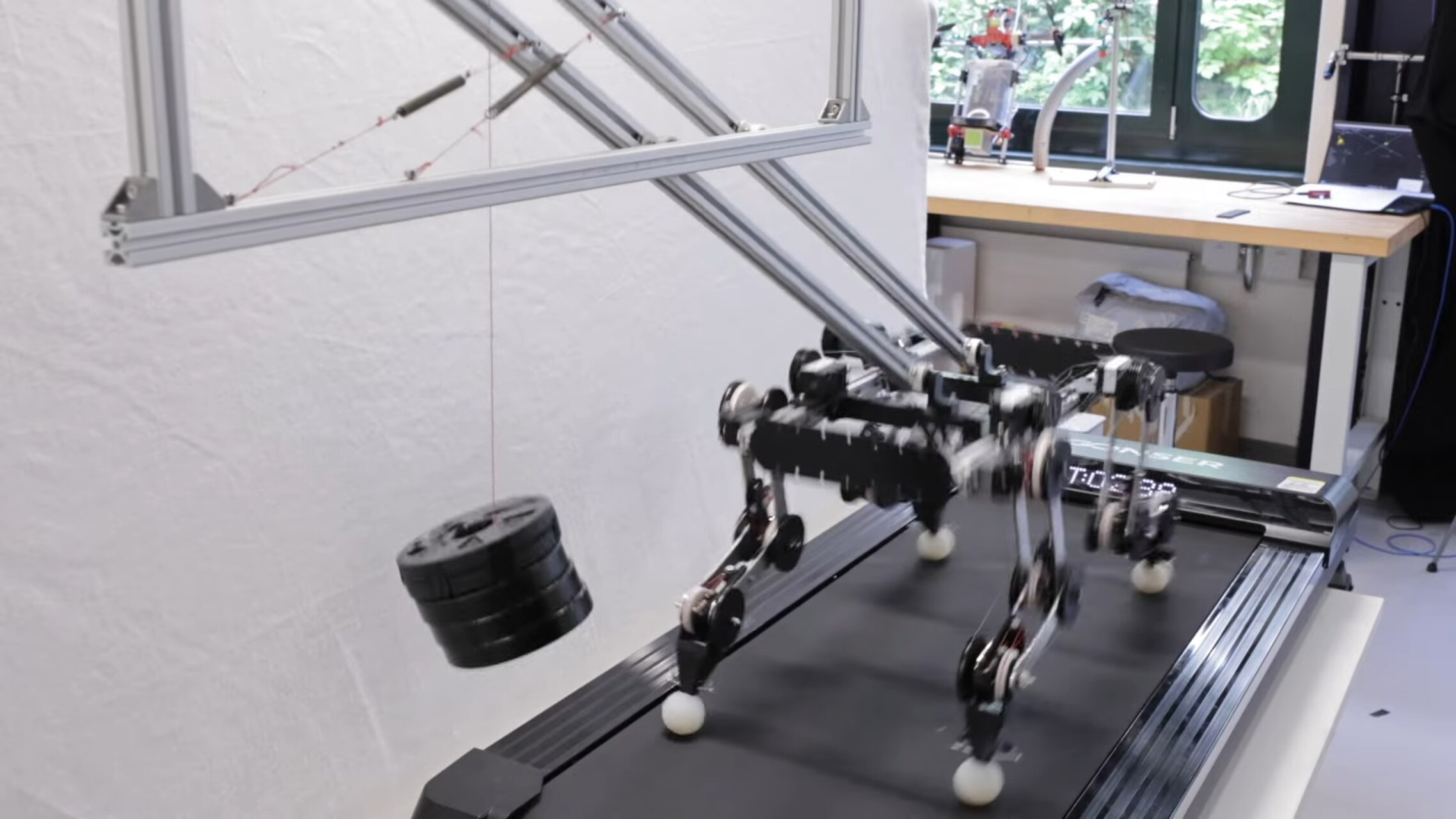
Gli ingegneri hanno acquistato un tapis roulant per testare il loro prototipo. Hanno scoperto che, una volta avviato, l’automa canino poteva correre autonomamente senza dover attivare i motori di controllo.
“All’inizio abbiamo pensato che si trattasse di un caso fortuito. Così abbiamo modificato leggermente il progetto e testato di nuovo il robot, che non riusciva più a funzionare”.
Tuttavia, il team di ricerca ha finito per aggiungere un contrappeso, simile a un pendolo, in modo che il robot potesse rimanere in movimento una volta avviato.
“Il contrappeso utilizza la risonanza per iniettare energia”, spiega Mickaël Achkar.
Francesco Stella, dottorando al CREATE e supervisore del progetto, aggiunge: “Abbiamo progettato il corpo del robot in modo che fosse in grado di rispondere automaticamente, proprio come una trota inizia a nuotare automaticamente quando viene messa in acqua”.
Un lampone di… silicone per istruire i robot alla raccolta
Pulizia e sanificazione impianti VMC: perché i robot hi-tech

(Foto: EPFL)
Articolazioni che si muovono in sinergia: “L’obiettivo è quello di esplorare progetti di robot ispirati alla biologia”
I motori di controllo del robot sono comunque utili per ottenere una gamma più ampia di movimenti. Ad esempio, può saltare e superare gli ostacoli senza l’aiuto del contrappeso.
“Vorremmo spingere ulteriormente il nostro progetto con i motori, ma per ora il prototipo non è molto robusto”, dice il dottor Achkar.
Questo non gli ha impedito di mettere alla prova il cane meccanico, ad esempio collocandogli un bastone tra le gambe per vedere come avrebbe reagito. Indifferente, il robot ha ripreso automaticamente il suo galoppo aggraziato. E sul tapis roulant raggiunge facilmente la velocità di 6 km orari.
“Il nostro obiettivo non è quello di competere con cani robotici ultra-tecnologici, ma piuttosto di esplorare progetti di automo ispirati alla biologia”, racconta ancora il ricercatore dell’EPFL.
“Questo significa affinare il design fondamentale di un robot e modificare le sue proprietà passive in modo che siano necessari solo semplici sistemi di controllo, il tutto massimizzando le capacità del mezzo. Quello che abbiamo fatto qui, ingegnerizzare le articolazioni per farle lavorare in sinergia, si è già dimostrato utile per creare mani robotiche e altre parti del corpo”.
Mickaël Achkar ha presentato il suo lavoro di ricerca a una rivista scientifica per la pubblicazione, che dovrebbe avvenire nei prossimi mesi. Dopo aver completato il Master in ingegneria robotica, intende tornare a Montréal.
È arrivato all’EPFL dal Canada dopo aver conseguito una laurea in ingegneria meccanica alla McGill University.
Perché ha scelto il Politecnico Federale di Losanna? Perché offriva un’istruzione eccellente e si trovava in una zona francofona dell’Europa. Inoltre, gli ha dato la possibilità di scoprire l’eccitante mondo della robotica.
Robot di Samaria per curare il corpo e quietare lo spirito?
Il giusto omaggio di Lugano al giovane team Smilebots di robotica




















Il cane robot ispirato alla vera biologia animale del Politecnico di Losanna

Potresti essere interessato anche a:

Stati Uniti: Grana Padano protagonista della ristorazione
Il Consorzio di Tutela vola a San Antonio per la prima tappa di una campagna che sensibilizza i consumatori sul tema dell’Italian Sounding

Deep Sea Mining, la corsa all’oro che minaccia le balene
L'allarme degli scienziati: se l’ISA darà il via libera all’estrazione di minerali sui fondali marini ci saranno conseguenze catastrofiche...

Tutta l’innovazione dell’approdo del Gruppo Chery in Europa
Il 4 luglio i brand cinesi Omoda e Jaecoo hanno fatto il loro debutto a Milano e sul nostro mercato con auto sostenibili e al passo dei tempi

Le sostanze chimiche degli pneumatici finiscono nel nostro cibo
Uno studio austriaco dimostra che gli additivi sprigionati dall’usura delle gomme su strada finiscono nelle verdure in vendita al supermercato

 //
//