
Nuovi muscoli artificiali: robot più leggeri, più sicuri e più robusti
Dagli studi del Politecnico di Zurigo una tecnologia per fasce muscolari più simili a quelle dell'uomo e sensibili nelle interazioni con l’ambiente
I ricercatori del Politecnico di Zurigo hanno recentemente sviluppato muscoli artificiali per il movimento dei robot, ma la loro soluzione offre diversi vantaggi rispetto alle tecnologie viste in precedenza.
Meritevole di approfondimento, essa può essere utilizzata in tutti i casi in cui i robot devono essere morbidi anziché rigidi o devono essere più sensibili nell’interazione con l’ambiente.
Molti robotisti sognano di costruire robot che non siano soltanto una combinazione di metallo o altri materiali duri e motori, ma anche più morbidi e adattabili.
Gli automi “soft” potrebbero interagire con l’ambiente in modo completamente diverso; ad esempio, potrebbero attutire gli urti come fanno gli arti umani o afferrare un oggetto con delicatezza.
Questo offrirebbe vantaggi anche per quanto riguarda il consumo energetico: oggi il movimento dei robot richiede di solito molta energia per mantenere a lungo una posizione, mentre i sistemi morbidi potrebbero immagazzinarla al meglio.
Quindi, che cosa c’è di più ovvio di prendere a modello il muscolo umano e di cercare di ricrearlo?
Addio, NCCR Robotics: dodici anni pieni al servizio della Svizzera
C’è un drone che si “arrampica” sugli alberi per proteggerli

Anche ogni muscolo naturale si contrae in risposta a un impulso elettrico sufficiente
Il funzionamento dei muscoli artificiali si basa necessariamente sulla biologia.
Così come le loro controparti naturali, i muscoli artificiali si contraggono in risposta a un impulso elettrico.
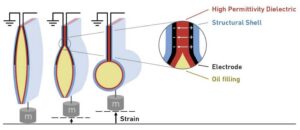
Tuttavia, i muscoli artificiali non sono costituiti da cellule e fibre, ma da una sacca riempita con un liquido (di solito olio), il cui involucro è parzialmente ricoperto da elettrodi.
Quando questi elettrodi ricevono una tensione elettrica, si uniscono e spingono il liquido nel resto della sacca, che si flette ed è quindi in grado di sollevare un peso.
Una singola sacca è analoga a un breve fascio di fibre muscolari.
Diverse di queste sacche possono essere collegate fra loro per formare un elemento di propulsione completo, che viene anche chiamato attuatore o, più semplicemente, muscolo artificiale.
Premio a ProteusDrone, il soffice robot dalle forme mutanti
Un cane robot: l’invenzione elvetica ispirata alla biologia animale
(Illustrazione: Gravert e altri/Science/ETH Zurigo)
In origine gli attuatori elettrostatici richiedevano una tensione da 6.000 a 10.000 Volt
L’idea di sviluppare muscoli artificiali non è nuova, ma finora c’è stato un grosso ostacolo alla loro realizzazione: gli attuatori elettrostatici funzionavano soltanto con tensioni estremamente elevate, da 6.000 a 10.000 Volt circa.
Questo requisito aveva diverse conseguenze: ad esempio, i muscoli dovevano essere collegati a grandi e pesanti amplificatori di tensione, non funzionavano in acqua e non erano del tutto sicuri per gli esseri umani.
Una nuova soluzione è stata ora sviluppata da Robert Katzschmann, professore di robotica al Politecnico di Zurigo, insieme a Stephan-Daniel Gravert, Elia Varini e ad altri colleghi.
Essi hanno pubblicato un articolo sulla loro versione di un muscolo artificiale, che offre realmente diversi vantaggi, in un articolo sul sito Web d’informazione “Science Advances”.
Stephan-Daniel Gravert, che lavora come assistente scientifico nel laboratorio di Robert Katzschmann, ha progettato un inedito guscio per la sacca.
Un nuovo drone anticendio anglosvizzero in aiuto ai vigili del fuoco
Così in Svizzera i robot “apprendono” i segreti del trekking

(Foto: Gravert e altri, Science, 2024)
La soluzione per il futuro? Oggi arriva da materiale ferroelettrico ad alta permeabilità
I ricercatori chiamano i nuovi muscoli artificiali attuatori HALVE, dove HALVE sta per “Hydraulically Amplified Low-Voltage Electrostatic”.
“In altri attuatori, gli elettrodi si trovano all’esterno del guscio. Nel nostro, il guscio è composto da diversi strati. Abbiamo preso un materiale ferroelettrico ad alta permeabilità, cioè in grado di immagazzinare quantità relativamente elevate di energia elettrica, e lo abbiamo abbinato a uno strato di elettrodi. Poi abbiamo rivestito il tutto con un guscio polimerico che ha eccellenti proprietà meccaniche e rende la sacca più stabile”, spiega.
In questo modo i ricercatori hanno potuto ridurre la tensione richiesta, perché la permittività molto più elevata del materiale ferroelettrico consente di ottenere grandi forze a dispetto della bassa tensione.
Stephan-Daniel Gravert ed Elia Varini non soltanto hanno sviluppato insieme il guscio degli attuatori HALVE, ma hanno anche costruito gli attuatori stessi in laboratorio per utilizzarli in due robot specifici.
A Tel Aviv un laboratorio Enel sull’uso di AI e robotica nell’energia
Ecco come il robot Atlas può già lavorare e interagire con noi
(Foto: screenshot del video di Gravert e altri, Science, 2024)
“Pinze” e “pesci” tecnici mostrano che cosa può fare il muscolo congegnato in Svizzera
Uno di questi esempi di robot è una pinza alta 11 centimetri e dotata di due dita.
Ogni dito è mosso da tre sacche collegate in serie dell’attuatore HALVE.
Un piccolo alimentatore a batteria fornisce al robot 900 Volt.
Insieme, la batteria e l’alimentatore pesano soltanto 15 grammi.
L’intera pinza, compresa l’elettronica di alimentazione e controllo, ne pesa invece 45.
La pinza è in grado di afferrare un oggetto di plastica liscio con sufficiente forza da sostenere il proprio peso quando l’oggetto viene sollevato in aria con una corda.
“Questo esempio dimostra in modo eccellente quanto siano piccoli, leggeri ed efficienti gli attuatori HALVE. Significa anche che abbiamo fatto un enorme passo avanti verso il nostro obiettivo di creare sistemi integrati azionati dai muscoli”, afferma soddisfatto Katzschmann.
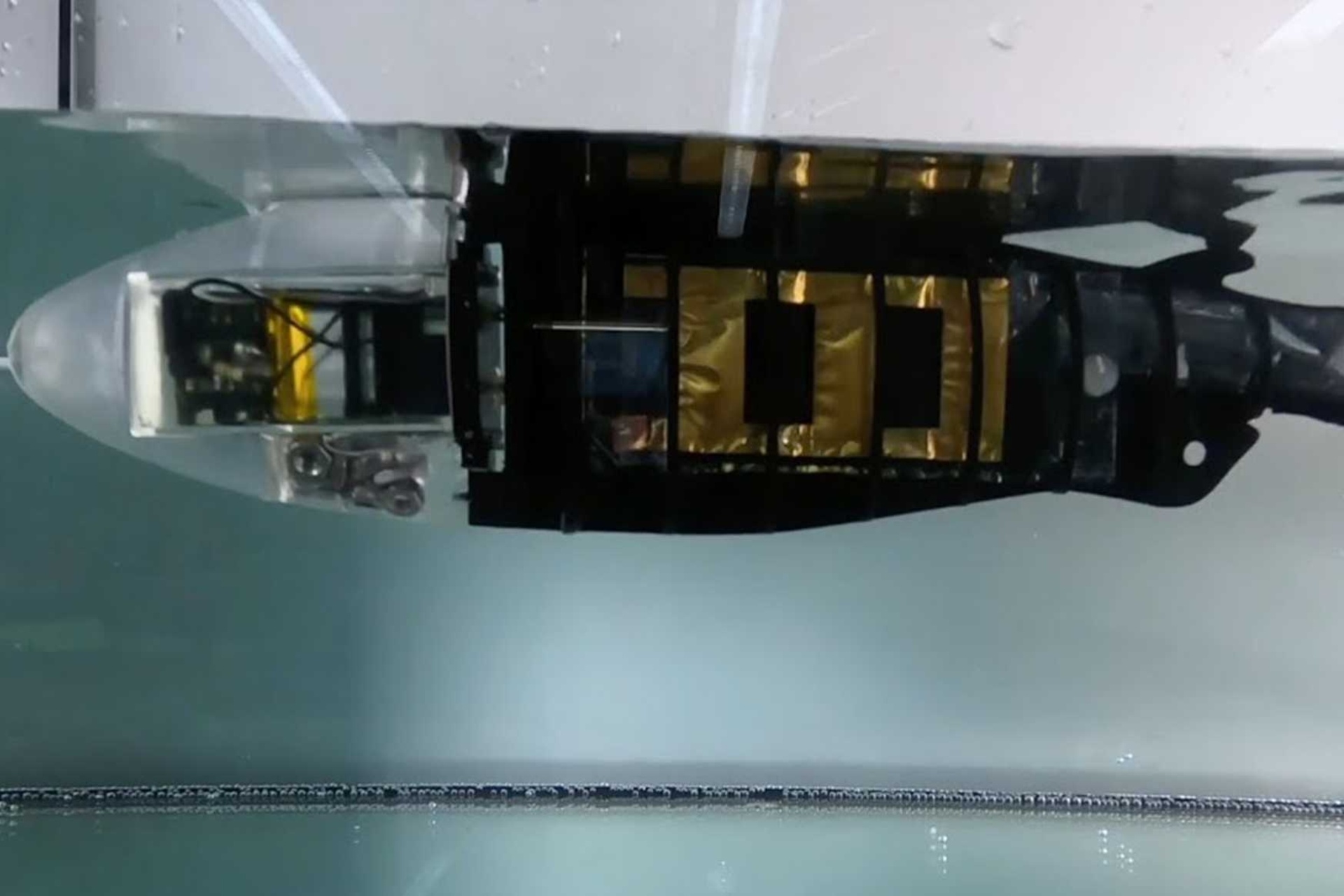
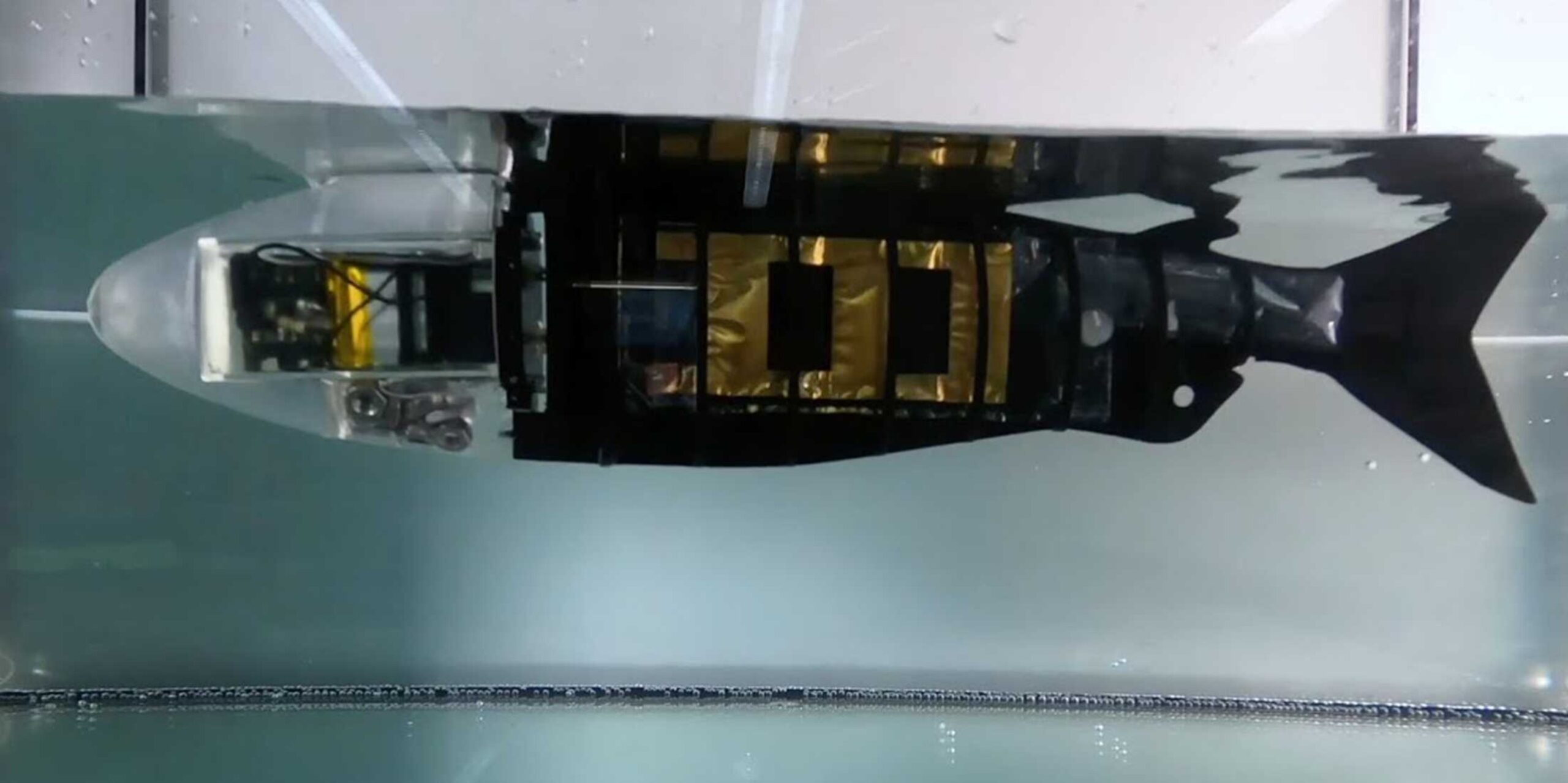
Il secondo oggetto è un nuotatore simile a un pesce, lungo quasi 30 centimetri, in grado di muoversi agevolmente nell’acqua.
È costituito da una “testa” che contiene l’elettronica e da un “corpo” flessibile, cui sono attaccati gli attuatori “Hydraulically Amplified Low-Voltage Electrostatic”.
Questi attuatori si muovono alternativamente in un ritmo che produce il tipico movimento del nuoto.
Il pesce autonomo può passare da una situazione di stasi a una velocità di tre centimetri al secondo in 14 secondi, e tutto questo immerso in normale acqua di rubinetto.
Un cane robot: l’invenzione elvetica ispirata alla biologia animale
In Svizzera i Politecnici Federali per un’IA trasparente e affidabile

I nuovi attuatori sono molto più robusti di altri muscoli artificiali nonché impermeabili
Questo secondo esempio è importante perché dimostra un’altra nuova caratteristica degli attuatori HALVE.
Poiché gli elettrodi non sono più protetti all’esterno del guscio, i muscoli artificiali sono ora impermeabili e possono essere utilizzati anche immersi in liquidi conduttivi.
“Il pesce illustra un vantaggio generale di questi attuatori: gli elettrodi sono protetti dall’ambiente esterno e, viceversa, l’ambiente è protetto dagli elettrodi. Quindi, è possibile utilizzare questi attuatori elettrostatici in acqua oppure toccarli, per esempio”, aggiunge il docente del Politecnico Federale di Zurigo.
La struttura a strati delle buste presenta altresì un altro vantaggio: i nuovi attuatori sono molto più robusti di altri muscoli artificiali.
Idealmente, le buste dovrebbero essere in grado di compiere una grande quantità di movimenti e di farlo rapidamente.
Tuttavia, anche il più piccolo errore di produzione, come un granello di polvere tra gli elettrodi, può portare a un guasto elettrico, una sorta di “mini fulmine”.
Il 4 novembre a Losanna la “Giornata Svizzera della Robotica”
Con il DroneHub un’inedita… “voliera” per la ricerca sui droni

Risolti i problemi dei “mini fulmini”, aziende pronte per una produzione su larga scala
“Quando ciò accadeva nei modelli precedenti, l’elettrodo si bruciava, creando un foro nel guscio. Questo permetteva al liquido di fuoriuscire e rendeva l’attuatore inutilizzabile”, spiega ancora Stephan-Daniel Gravert.
Questo problema è stato risolto negli attuatori HALVE perché un singolo foro si chiude essenzialmente da solo, grazie allo strato protettivo esterno in plastica.
Di conseguenza, l’astuccio rimane completamente funzionante anche dopo un guasto elettrico.
I due ricercatori sono chiaramente felici di aver fatto un passo avanti decisivo nello sviluppo di muscoli artificiali, ma sono anche realisti.
Come dice Robert Katzschmann, “ora dobbiamo preparare questa tecnologia per una produzione su larga scala, e non possiamo farlo qui nel laboratorio dell’ETH. Senza fare troppe rivelazioni, posso dire che stiamo già registrando l’interesse di aziende che vorrebbero lavorare con noi”.
Ad esempio, i muscoli artificiali potrebbero un giorno essere utilizzati in nuovi robot, protesi o dispositivi indossabili.
In altre parole, in tecnologie da usare nel e sul corpo umano…
Un lampone di…silicone per istruire i robot alla raccolta
Il giusto omaggio di Lugano al giovane team Smilebots di robotica



Pinza non vincolata, guidata da attuatori HALVE, che afferra un blocco di PLA
Pesce artificiale non vincolato, guidato da attuatori HALVE, in acqua di rubinetto
Potresti essere interessato anche a:

Stati Uniti: Grana Padano protagonista della ristorazione
Il Consorzio di Tutela vola a San Antonio per la prima tappa di una campagna che sensibilizza i consumatori sul tema dell’Italian Sounding

Deep Sea Mining, la corsa all’oro che minaccia le balene
L'allarme degli scienziati: se l’ISA darà il via libera all’estrazione di minerali sui fondali marini ci saranno conseguenze catastrofiche...

Tutta l’innovazione dell’approdo del Gruppo Chery in Europa
Il 4 luglio i brand cinesi Omoda e Jaecoo hanno fatto il loro debutto a Milano e sul nostro mercato con auto sostenibili e al passo dei tempi

Le sostanze chimiche degli pneumatici finiscono nel nostro cibo
Uno studio austriaco dimostra che gli additivi sprigionati dall’usura delle gomme su strada finiscono nelle verdure in vendita al supermercato

 //
//